Boundary-denoising for video activity localization
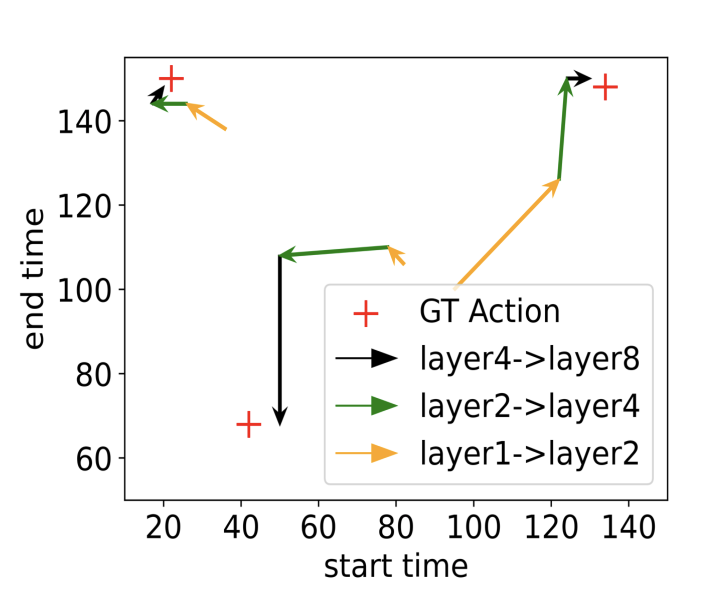 Illustration of the boundary denoising process. Arrows show the predicted noise from each of our decoder layers, visualized on the start-end boundary map. The Average mAP of layer1, layer2, layer4, and layer8 outputs are increasing as 38.48%, 42.07%, 44.57%, and 45.29%.
Illustration of the boundary denoising process. Arrows show the predicted noise from each of our decoder layers, visualized on the start-end boundary map. The Average mAP of layer1, layer2, layer4, and layer8 outputs are increasing as 38.48%, 42.07%, 44.57%, and 45.29%.Abstract
Video activity localization aims at understanding the semantic content in long, untrimmed videos and retrieving actions of interest. The retrieved action with its start and end locations can be used for highlight generation, temporal action detection, etc. Unfortunately, learning the exact boundary location of activities is highly challenging because temporal activities are continuous in time, and there are often no clear-cut transitions between actions. Moreover, the definition of the start and end of events is subjective, which may confuse the model. To alleviate the boundary ambiguity, we propose to study the video activity localization problem from a denoising perspective. Specifically, we propose an encoder-decoder model named DenosieLoc. During training, a set of action spans is randomly generated from the ground truth with a controlled noise scale. Then, we attempt to reverse this process by boundary denoising, allowing the localizer to predict activities with precise boundaries and resulting in faster convergence speed. Experiments show that DenosieLoc advances several video activity understanding tasks. For example, we observe a gain of +12.36% average mAP on the QV-Highlights dataset. Moreover, DenosieLoc achieves state-of-the-art performance on the MAD dataset but with much fewer predictions than others.